지금 인류는 1960년대 미국과 구소련 간 우주경쟁 이후 가장 뜨겁고 흥미로운 우주경쟁을 지켜 보고 있다. 미 항공우주국(NASA)와 민간 우주기업들의 상업 프로젝트 외에 중국과 러시아가 달에 영구적인 정착지를 건설할 계획을 밝히고 있다. 게다가 두 나라는 또한 최근 화성에서도 그러한 장기 계획을 발표했다.
이런 가운데 이미 알려졌다시피 미국이 오는 2024년 아르테미스 계획을 통해 인류를 또다시 달에 보내려 하고 있다. 지난 1969년 인류최초로 달에 인간을 보낸 이후 55년 만이다.
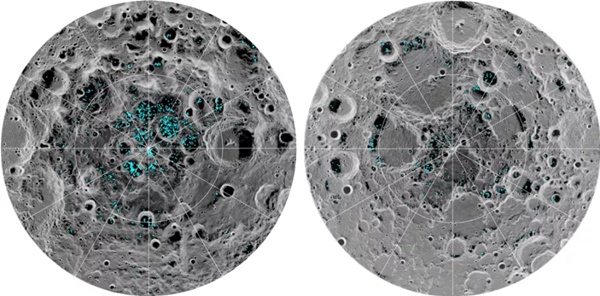
그간의 탐사 결과 달의 극지방(특히 남극)지방의 큰 분화구 아래 그늘진 바닥에는 풍부한 양의 물얼음이 있다는 것이 드러났는데 말할 것도 없이 물은 달 영구기지 건설과 화성 진출을 위한 교두보(연료공급기지) 확보에 필수적이다. 달 얼음을 채굴해 물을 만들면 로켓연료의 주 성분인 수소와 산소로 분해할 수 있기 때문이다.
당장 미국은 오는 2023년 아르테미스 프로그램에 앞서 달에 보낼 탐사 로봇에서 가장 흥미로운 방법으로 이를 시험하게 될 것 같다.
NASA가 달 얼음 채굴 기술을 발전시키기 위해 50만달러(약 5억7340만원)의 상금을 내걸고 ‘달 얼음 깨기 챌린지’(Break the Ice Lunar Challenge)를 진행중인데 오는 8월13일 발표될 1단계 경연에서 단연 주목받는 방식이 바로 로켓 분사 열을 사용한 달의 물 얼음을 채굴하는 방식이다.
1등 수상 후보 중 하나인 마스텐(Masten)-루나 아웃포스코트(Lunar Outpost)-허니비 로보틱스(Honeybee Robotics) 그룹은 818kg 무게의 달 탐사로봇에 장착된 로켓 엔진을 사용하는 로켓 채굴 시스템(Rocket Mining System)을 개발 중이다.

최근 마스텐은 공식 웹사이트 블로그를 통해 이 같은 내용을 공유했다.
달에서의 물 확보가 달 착륙 이후 우주 경쟁 승리의 관건이 여기에 달려 있다는 점에서 NASA는 이에 주목하고 있다고 한다. 이 내용을 NASA가 이미 쏘아 보내기로 결정한 드릴방식 얼음 채굴 시험 로봇과 함께 소개한다.
달 착륙 이후 우주 경쟁 승리의 관건은 달에서 물 확보
우선 마스텐 팀의 아이디어는 이렇다.
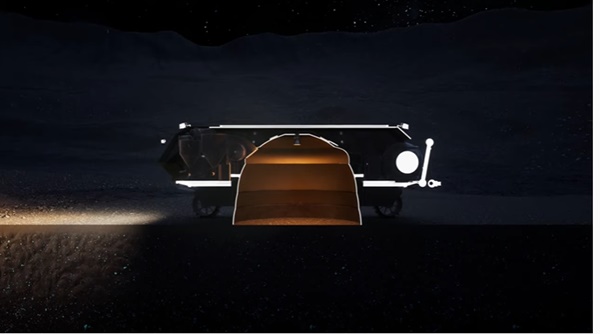
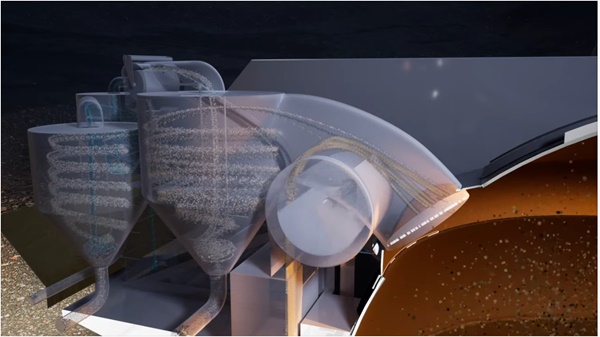
이 팀의 ‘로켓 채굴 시스템’은 탐사로봇이 얼음이 많이 있는 장소에 도달하면 돔으로 둘러싸인 엔진을 지표면에 전개해 로켓을 분사하게 된다. 이 때 로봇 내 진공 장치가 채굴된 얼음조각들을 빨아들여 달 먼지와 자갈을 걸러내고 가스를 분리 배출한 후 얼음 입자를 물로 분리해 저장하게 된다.
마스텐 관계자는 블로그에서 “이 시스템은 하루에 최대 12개의 분화구를 채굴하고 분화구당 100kg의 얼음을 생산할 것으로 예상된다”며 “이는 우리가 매년 42만kg 이상의 달 물을 회수할 수 있게 해 줄 것이다”라고 설명했다.
달에서 회수된 모든 얼음은 로켓 엔진에 연료를 공급할 수 있어 5년 이상 작동할 수 있다. 이 개념이 모든 경쟁자들을 능가한다면, 로켓 채굴 시스템은 아마도 마스텐의 달 착륙선을 통해 남극 얼음 채굴지에 도착하게 된다. 이 임무는 NASA의 8차례 실험을 위한 다양한 상업용 탑재물들과 함께 달의 남극 지역으로 운반할 것이다.
마스텐의 첫 달 표면 탐사는 XL-1 착륙선을 사용하게 된다. 이 착륙선은 오는 2023년 스페이스X의 팰콘9 로켓에 실려 발사될 예정이다. 만약 모든 것이 잘 진행된다면 이 로켓 발사때엔 몇 개의 상업적 탑재물 외에 NASA의 실험물까지 달의 남극 지역으로 보내게 된다.

마스텐과 함께 작업중인 루나 아웃 포스트는 달의 얼음을 추출하고 이동시키기 위한 로켓 채굴 시스템(Rocket Mining System)용 탐사로봇 ‘로켓 M’을 설계하고 만든다. 또 허니비 로보틱스는 달얼음에서 먼지와 가스를 제거하고 물을 추출해 줄 플래닛 백(Planet Vac)기술을 담당한다.
탐사로봇인 ‘로켓M’의 무게는 818kg이지만 300kg의 얼음을 적재하면 1118kg이 된다. 착륙지점에서 4km 정도 떨어진 곳을 시속 3.3~3.45km로 이동해 얼음 채굴지점에 도착한다.
채굴 지점에 도착하면 자체 로켓 분사, 자체 분류, 냉각 과정을 거쳐 순수한 물 성분만 추출하게 된다. 하루 4개 장소에서 각각 3개의 크레이터를 대상으로 채굴 작업을 하게 된다.

채굴된 얼음의 85%가 물이하고 가정할 때 크레이터 당 100kg의 얼음을 채굴하게 된다. 1년간 355일을 작업한다고 할 때 42만6000kg의 물을 얻을 수 있다. 이는 NASA가 목표로 하는 연 1만kg의 물의 43배나 되는 양이다.

NASA, 지난해 이미 드릴로 달 얼음 캐내는 탐사 시험 로봇 발사키로 예정
그런데 NASA는 이미 지난해 달 얼음채굴을 위한 채굴 시험 기계를 선정해 발사 계획을 발표해 놓았다.
당시 NASA의 선택은 앞서의 로켓으로 얼음을 녹이는 방식이 아니다.

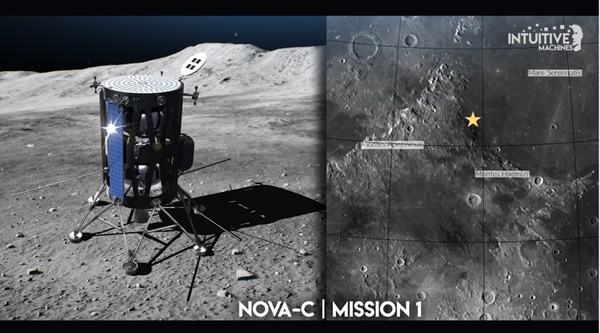
‘인튜이티브 머신’(Intuitive Machine)사는 말그대로 직접 캐내는 방식의 기계를 사용한다. NASA는 다양한 방식으로 다단계로 달 얼음 채굴에 다가가고 있는 것으로 보인다.
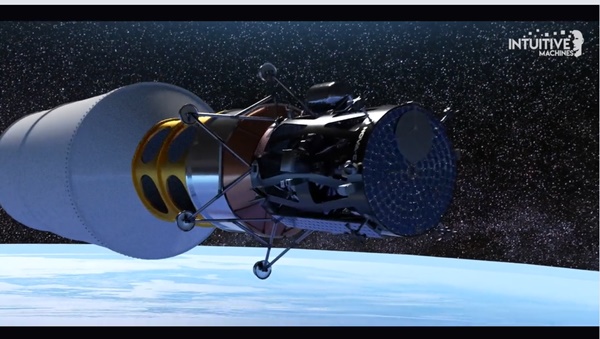
NASA와 계약한 인튜이티브 머신즈는 내년 12월 NASA의 상업용 달 탑재 서비스 프로그램(CLPS) 일환으로 이 달 얼음 채굴 로봇을 달에 보낼 예정이다.
NASA의 지난해 10월 발표에 따르면 나사는 2022년 12월 인튜이티브 머신즈를 선정, 노바C(Nova-C) 착륙선에 달 남극의 얼음채굴 실험 미션용 40kg짜리 탑재체인 프라임-1(Prime-1) 채굴로봇을 실어 보내기로 했다.
인튜이티브 머신즈는 계약에 따라 NASA의 극지방 자원 얼음 채굴 실험기구를 달의 남극에 전달하기 위해 4700만 달러(약 540억원)를 받게 된다.
NASA는 이것이 달 내부에서 물 얼음을 채취하기 위해 고안된 최초의 임무라고 말했다.
프라임-1은 달 표면 아래 약 1m까지 드릴로 파고 들어가 매몰된 얼음을 탐색할 예정이다. 이 실험에는 프라임-1의 샘플에서 나온 얼음이 바로 증기로 변화하는 우주에서의 승화과정에서 얼마나 손실되는지 측정하는 질량분석기가 포함된다.
짐 로이터 NASA 우주기술 담당 부국장은 “프라임-1은 우리에게 달에 있는 자원과 자원을 추출하는 방법에 대한 엄청난 통찰력을 줄 것”이라고 말했다.
NASA 관계자는 “달의 물 얼음은 나사가 2024년 달로 우주인을 다시 보내는 아르테미스 프로그램에서 개발하고 싶어하는 자원”이라는 강조했다.
토머스 주부첸 NASA 과학 임무 부국장은 지난해 10월 16일 성명서에서 “우리가 프라임-1과 달 표면으로 보낼 다른 과학 기구와 기술 시연으로부터 얻게 될 정보는 아르테미스 유인 우주비행 임무에 정보를 주고 우리가 어떻게 지속 가능한 달 존재를 구축할 수 있는지를 더 잘 이해하는 데 도움을 줄 것이다”라고 말했다.
과연 오는 8월 13일 나사 챌린지에서 마스텐의 로켓을 사용하는 달얼음 채굴 방식이 선택될까.
아래 동영상에서 달 탐사 경쟁의 주도권을 좌우할 흥미진진한 달 얼음물 추출 과정을 살펴볼 수 있다.

















소셜댓글