

지난해 6월 24일 미국 플로리다주에서 싱크홀로 인해 12층 콘도 건물이 무너지는 재난이 발생했다. 그러나 세계를 놀라게 한 이 사고 현장에서 생존자 파악 및 구조 과정에 사용된 로봇은 무인항공기(드론) 외에는 뚜렷한 것이 없었다. 그간 수많은 로봇공학연구자들이 이럴 때 유용하다는 로봇을 개발했다고 했지만 무색해졌다.
당시 현지 언론 마이애미 헤럴드에 따르면 구조대원들은 개와 마이크를 이용해 뒤엉켜 있는 거대한 건물 잔햇더미 속 생존자들을 찾으면서 조심스럽고도 긴급히 잔해를 치우는 게 고작이었다. 실용적이고 유용한 로봇의 재난 현장 투입은 먼일일까.
텍사스A&M대에서 인간적 로봇 및 AI연구소(이전 로봇수색및구조센터·CRASAR)를 이끌던 로빈 머피 소장은 “현재로선 재난현장의 붕괴된 건물 잔해 수색에 로봇을 사용하는 것은 현실적으로 어떤 방법으로도 가능하지 않다”며 “로봇이 붕괴된 비구조적(비정형적) 건물 잔해 더미에서 탐색 작업하기가 여전히 어렵기 때문”이라고 설명했다.
실제로 건물붕괴 현장에 투입될 대부분의 로봇은 돌무더기를 통과하기에는 너무 크다. 아주 작은 로봇들에게도 재난 현장 환경은 우호적이지 않다. 재난 현장은 배관 파열로 인해 여기저기서 물이 나오고 (다른 많은 물리적 위험들 중에서도 특히) 모든 것이 진흙에 묻혀있고 미끄럽기까지 하다. 최근 이런 상황에서 희망을 주는 중국 로봇 연구팀의 연구 성과가 보고 됐다. 아주 유연하고 힘 있고 민첩한 쥐 로봇이다.
그간 재난 구조 로봇이 개발되기 힘들었던 이유와 이의 해결책이 될 희망을 주는 중국 연구팀의 최신 연구 결과를 소개한다.
재난구조 로봇 개발이 더딘 이유는 건물 잔해는 예측 불가한 환경
이상적인 관점에서 잔해를 탐사하는 로봇은 희생자를 찾는 것은 물론 각종 센서(시각 센서와 음향 센서 등)를 사용해 이들의 위치를 확인함으로써 구조하는 데 도움을 줄 수도 있어야 한다.
그러나 현실은 다르다. 무선 통신이나 위치 파악이 불가능한 경우가 많아 유선으로 통신과 전력 공급 문제를 해결해야 하는데 그럴 경우 로봇은 쉽사리 장애물에 걸리거나 얽혀버리기 일쑤다.
지금까지 재난구조용 로봇 가운데 잔햇더미에서 이를 위해 강제로 굴을 파는 능력을 갖춘 로봇은 없었다. 때문에 이 분야가 활발한 연구 주제가 되고 있다. 강제 굴착 능력은 로봇이 잔해 속에서 가고자 하는 곳에 터널이나 빈 공간이 없을 때 움직이도록 하기 위해 매우 중요하다. 하지만 로봇을 만들어 필요한 곳에 도착한다 해도 어떤 가치를 제공할 수 있을지 의문이라는 게 고민이다.
재난구조용으로 가장 이상적인 동물로 족제비가 꼽힌다. 머피 소장은 “그것은 매우 길고 작은 족제비처럼 보일 것이다. 손으로 잡고 밀 수 있는 작은 다리와 앞발을 가진, 유연하고 뱀처럼 생긴 몸통을 가진 로봇이다”라고 말한다. 이 로봇 족제비는 굴을 파고, 몸을 뒤틀어 빠져나오고 비틀린 틈 사이로 몸을 구부려 비집고 다닐 수 있으며, 센서를 보호하고 청소할 수 있는 기능성 눈꺼풀을 갖추게 될 것이다.
기어서 오르내리고, 몸을 웅크려 좁은 구역을 도는 로봇쥐
로봇쥐 개발자들은 이 소형 로봇이 재난 지역과 파이프 라인들을 감시하는 데 유용한 역할을 할 수 있을 것으로 기대하고 있다. 많은 로봇 공학자들이 좁은 공간을 돌아다닐 수 있을 만큼 민첩한 로봇을 설계하는 데 높은 관심을 기울여 왔다. 이는 예를 들어 재해 지역이나 파이프라인을 조사할 때 유용하다.
칭 시 베이징 공대 교수는 “다리 달린 로봇은 실제 활용 분야에서 매우 유망하지만, 좁은 공간에서 작동하기란 여전히 어렵다”고 말한다. 즉, 보스턴 다이내믹스의 대형 4족보행 로봇 스팟은 아주 좁은 공간으로 들어갈 수 없고, 초소형 마이크로 4족 로봇은 좁은 공간에 들어갈 수는 있지만 무거운 짐을 나르는 능력이 제한돼 업무 수행에 어려움을 겪는다.
때문에 그의 팀은 좁은 공간을 비집고 다니며, 위에서 볼 때 몸을 둥글게 회전하는 데 매우 능숙한 동물인 쥐로부터 영감을 받은 로봇을 만들기로 결정했다.
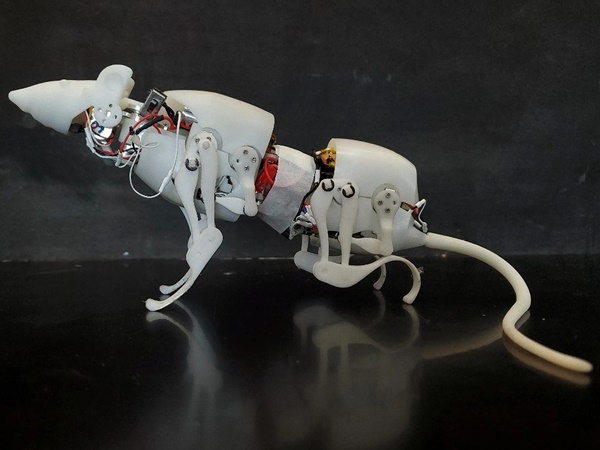
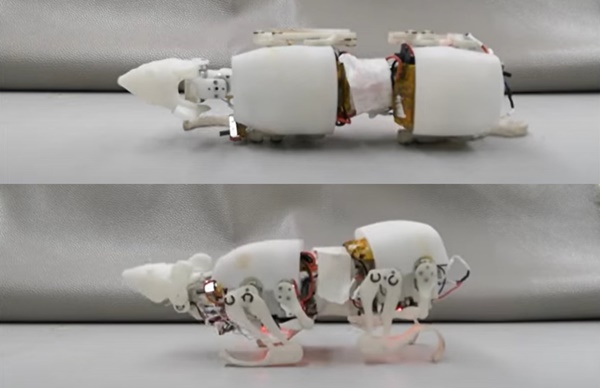
연구진이 개발한 쥐처럼 작은 크기의 4족 보행 로봇인 스큐로(Small-sized Quadruped Robotic Rat·SQuRo)는 사물 위로 걷고, 기어다니고, 오르며, 전례없는 민첩함으로 날쌔게 회전할 수 있는 모습을 보여주었다. 스큐로는 넘어지면 스스로 일어날 수도 있다.
연구팀은 쥐의 해부학, 특히 관절에 대해 더 잘 이해하기 위해 실제 쥐의 엑스레이 사진을 처음으로 사용했다.
그리고 나서 그들은 스큐로를 자신들이 연구한 쥐와 유사한 구조, 움직임 패턴, 그리고 자유도(DoF), 즉 2개의 좌표계를 갖도록 설계했다. 여기에는 각 사지, 허리, 머리에 두 개의 자유도를 갖도록 한 것이 포함된다. 이 설정을 통해 로봇은 실제 쥐의 유연한 척추 움직임을 그대로 복제할 수 있었다.
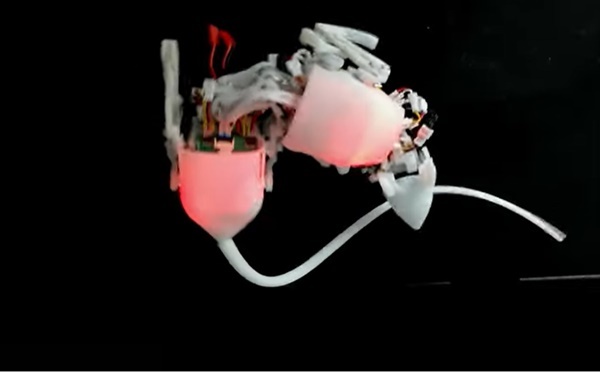
스큐로는 일련의 실험을 통해 시험됐으며, 먼저 웅크리고 있다가 서기, 걷기, 회전, 기어가기 등 네 가지 주요 동작을 수행할 수 있는 능력을 탐색했다. 회전 시험 결과는 특히 인상적이었다. 스큐로는 자신의 몸 길이의 절반도 안 되는 매우 빠듯한 반경에서 급회전할 수 있다는 것을 보여 주었다. 칭 시 교수는 “특히, 회전 반경은 다른 로봇들보다 훨씬 작아서 좁은 공간에서도 민첩한 움직임을 보장한다”고 말했다.
이어 연구원들은 더 어려운 시나리오에서 스큐로를 테스트했다. 그들이 고안한 한 상황에서 이 로봇쥐는 동굴 환경을 모방한 좁고 불규칙한 통로를 통과해야 했다. 스큐로는 이곳을 성공적으로 통과했다. 다른 시나리오에서는 스큐로는 200g 무게의 물체(몸무게의 91%)를 성공적으로 날랐다. 이 통로는 최대 20도로 기울기를 가진 지면이 포함돼 있었다.
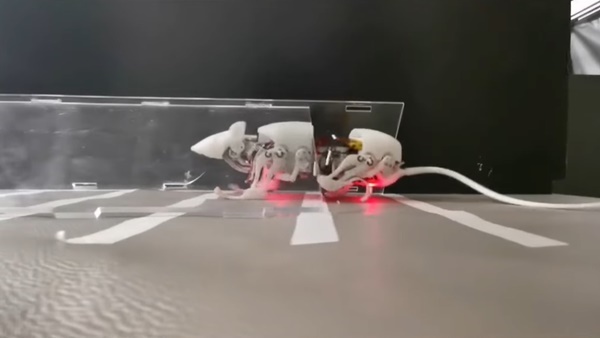
중요한 것은 재해 지역, 파이프라인 또는 기타 어려운 환경을 탐색하는 모든 로봇이 마주치게될 장애물을 극복할 수 있어야 한다는 것이다. 연구팀은 이 점을 염두에 두어 스큐로 설계시 실제 쥐들처럼 설계했다. 즉, 엉덩이로 웅크리고 앉아 앞다리가 물체를 넘을 수 있는 위치에 놓이도록 했다.
그들은 이 실험에서 스큐로가 자기 키의 33%에 달하는 30mm 높이의 장애물을 극복할 수 있다(성공률70%)는 것을 보여주었다. 마지막 실험에서 스큐로는 옆으로 넘어진 후에 똑바로 일어날 수 있었다.
칭 시 교수는 “우리가 아는 한 스큐로는 이 크기에서 웅크리고 있다가 서기, 걷기, 기어가기, 회전하기, 그리고 넘어졌다가 똑바로 서기를 포함한 다섯 가지 동작 모드를 수행할 수 있는 최초의 소형 4족보행 로봇이다”라고 말했다.
그는 자신의 팀은 이 로봇을 상용화하는 데 관심이 있으며 폐쇄 루프 제어와 심층 동적 분석을 통해 민첩성을 향상시킬 계획이라고 말한다.
칭 시 교수는 “게다가 우리는 좁고 구조화되지 않은 파이프라인에서 현장 테스트를 하기 위해 로봇에 더 많은 센서를 설치할 계획이다. 스큐로는 카메라 등 감지센서를 탑재해 파이프라인(고장) 탐지에 활용될 가능성이 있다고 확신한다”고 말했다.
이들의 연구결과는 4월 7일자 IEEE 트랜잭션 온 로보틱스(로봇교류)에 게재됐다.
이제 이 쥐를 재난 현장에 투입해 비정형 구조물 밑에 깔려 구조를 기다리는 사람들을 구할 수 있는지 확인해 보는 일이 남은 것 같다. 지진같은 자연재해로 건물 붕괴사고가 많이 일어나는 중국에서 유용할 것 같다. 이 로봇쥐의 성능이 좀더 향상돼 재난현장이나 실생활에서 유용하게 활용되고 있다는 소식이 들려오길 기대해 본다. 성능 향상에는 앞서 언급한 족제비가 굴을 파는 능력 등이 포함될 것이다.
아래 동영상은 베이징공대팀이 개발한 쥐 로봇의 기능을 보여준다.










소셜댓글